O naszej firmie
Jesteśmy nowoczesną, kreatywną, dynamicznie rozwijającą się firmą geodezyjną świadczącą usługi w zakresie technologii naziemnego skaningu laserowego.

Zdobyte doświadczenie w Polsce i zagranicą, pozwala Nam z powodzeniem realizować prace pomiarowe na całym świecie. Zapewniamy kompleksowe usługi w zakresie opracowania chmury punktów, w tym: dokumentacje 2D (rysunki elewacji, przekroje, rzuty), modele BIM, modele 3D. Oferowane produkty i usługi mają szerokie zastosowanie w architekturze, przemyśle, ochronie zabytków, górnictwie czy archeologii. Nasza wszechstronność pozwala na kreowanie najlepszych rozwiązań dla naszych Klientów.

Dlaczego my?
Stawiamy na kreatywność, innowacyjność i indywidualne podejście do Klienta. Nie boimy się ryzyka związanego z poszukiwaniem oraz stosowaniem nowych rozwiązań technologicznych. Każde zlecenie to dla nas nowe wyzwanie, które realizujemy na najwyższym poziomie.

Zastosowania naszych usług

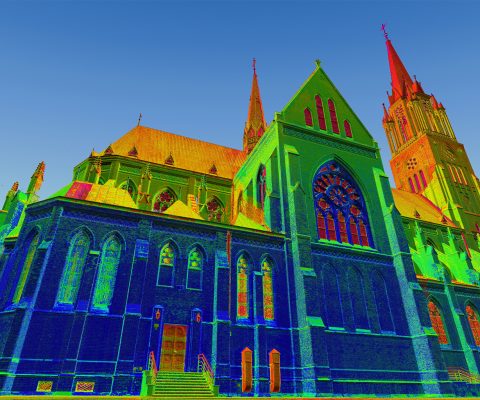
Oferujemy opracowanie szczegółowej dokumentacji powykonawczej obiektów architektonicznych, zrealizowanej w technologii BIM oraz CAD. Wykonujemy dokładne opracowania pełnej dokumentacji 2D: rysunki elewacji, rzuty, przekroje

Świadczymy usługi w zakresie inwentaryzacji powykonawczych: instalacji, maszyn oraz konstrukcji przemysłowych. Na podstawie precyzyjnych pomiarów opracowujemy kompleksowe dokumentacje CAD a także modele 3D CAD (.DWG, .DGN). Oferujemy wykonanie analiz detekcji kolizji przebiegu elementów projektowanych z istniejącymi obiektami.

Oferujemy opracowanie szczegółowej dokumentacji w postaci rysunków CAD, wysokorozdzielczych ortoobrazów (ortoplanów), animacji, wizualizacji oraz wirtualnych spacerów.

Oferujemy opracowanie szczegółowych modeli 3D wyrobisk wraz z pełną infrastrukturą techniczną, a także dokumentacji 2D CAD, wizualizacji oraz analiz deformacji.

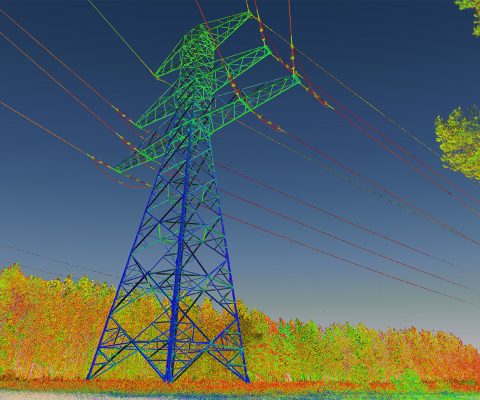
Dostarczamy szczegółowe opracowania CAD 2D profili i przekrojów do audytów linii energetycznych w standardach PSE, a także wykonujemy modele 3D stacji energetycznych.

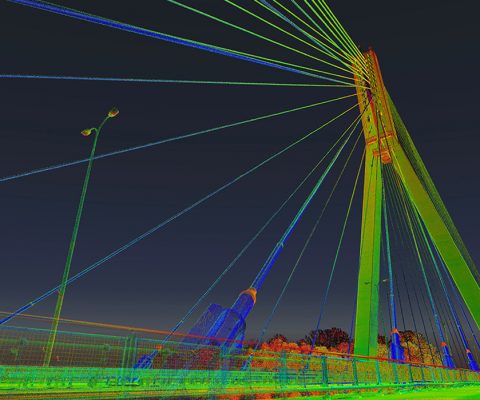
W ramach kompleksowej obsługi obiektów inżynierskich opracowujemy rysunki cyfrowe w dowolnym formacie CAD, a także modele 3D w standardach BIM. Ponadto obserwujemy i analizujemy stan techniczny oraz zachowanie różnych obiektów w trakcie ich eksploatacji, takich jak: mosty, tunele, zapory, torowiska, chłonie kominowe.

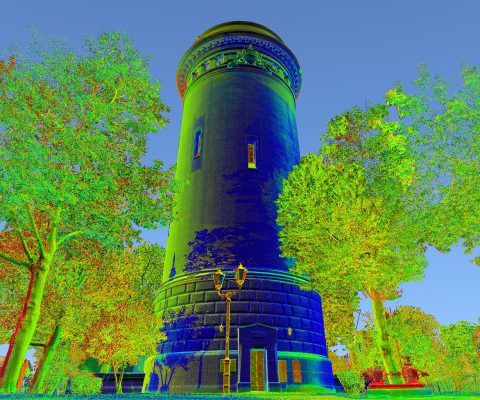
Oferujemy szeroki zakres usług związanych z generowaniem produktów i pozyskiwaniem informacji niezbędnych do badań i analiz archeologicznych. W zależności od oczekiwań Klienta opracowujemy barwne chmury punktów, dokumentacje CAD 2D, szczegółowe modele MESH z rzeczywistą teksturą oraz wizualizacje dla celów promocyjnych.

Proces opracowania
Analiza wymagań zamawiającego oraz informacji o obiekcie opracowania pozwala nam na dobranie najbardziej efektywnych rozwiązań.

Wykorzystanie wiodących technologii pomiarowych pozwala nam znacząco ograniczyć czas pozyskania danych o wysokiej jakości i szczegółowości.
Opracowanie wysokiej jakości danych w sposób efektywny i szybki uzyskujemy dzięki wykorzystaniu nowoczesnego oprogramowania oraz wysokiej klasy sprzętu.
Wytworzone produkty prezentujemy zgodnie ze obowiązującymi standardami, w dogodnych i przejrzystych dla zamawiającego formatach.
Poza gotowym produktem, gwarantujemy również wsparcie w wykorzystaniu opracowanych przez nas danych. Oferujemy szkolenie z podstawowej obsługi użytkowania zamówionego produktu, dostosowane do specyfiki Państwa pracy. Pragniemy dostarczyć naszym klientom pełne możliwości wykorzystania opracowanych danych.
Nasze produkty

Na podstawie skaningu laserowego 3D dostarczamy surowe dane w postaci chmury punktów.

Opracowujemy dokładne i szczegółowe widoki elewacji, rzuty kondygnacji oraz przekroje.

Przygotowujemy modele BIM wraz ze szczegółowymi bazami danych w środowiskach Autodesk Revit oraz ArchiCAD.

Oferujemy opracowanie modeli 3D CAD obiektów przemysłowych, architektonicznych oraz zabytkowych




Wykonujemy dokładne i szybkie pomiary objętości i powierzchni obiektów kubaturowych przy użyciu skaningu laserowego i fotogrametrii.

Opracowujemy analizy potencjalnych kolizji modeli CAD 3D w odniesieniu do chmury punktów.

Udostępniamy opracowane dane ze skaningu laserowego
w postaci przeglądarki panoramicznych chmur punktów TruView.
Wykonujemy rejestrację oraz orientację chmur punktów dla projektów liczących nawet ponad 1000 stanowisk.
Projekty